|
|
модель погрешности гироскопического устройства
Принятое математическое описание погрешности гироскопического устройства от некоторой совокупности факторов, определяющих условия функционирования гироскопического устройства.
Примечания
1. В качестве таких факторов могут использоваться проекции вектора перегрузки основания, температура, напряженность магнитного поля, погрешности изготовления и т.д.
2. Наиболее употребительной моделью погрешности гироскопического устройства является модель степенной зависимости проекций скорости ухода от проекций вектора перегрузки основания:
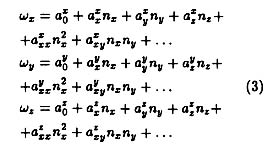
где
ωх, ωу, ωz, - проекции угловой скорости ухода гироскопического устройства;
nx, ny, nz - проекции вектора перегрузки основания на оси приборного трехгранника;
а0 - независящая от перегрузки составляющая погрешности гироскопического устройства;
ахnx, ауnу, аznz - составляющие погрешности гироскопического устройства, линейно зависящие от перегрузки;
aххn2x, aхуnхnу - квадратичные по перегрузке составляющие погрешности гироскопического устройства.
[Сборник рекомендуемых терминов. Выпуск 118. Гироскопия. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
|
|
EN |
|
|
FR |
|
|
Обобщающие термины
- характеристики гироскопических систем
|